Abstract
When fitting Gaussian Mixture Models to 3D geometry, the model is typically fit to point clouds, even when the shapes were obtained as 3D meshes. Here we present a formulation for fitting Gaussian Mixture Models (GMMs) directly to a triangular mesh instead of using points sampled from its surface. Part of this work analyzes a general formulation for evaluating likelihood of geometric objects. This modification enables fitting higher-quality GMMs under a wider range of initialization conditions. Additionally, models obtained from this fitting method are shown to produce an improvement in 3D registration for both meshes and RGB-D frames. This result is general and applicable to arbitrary geometric objects, including representing uncertainty from sensor measurements.
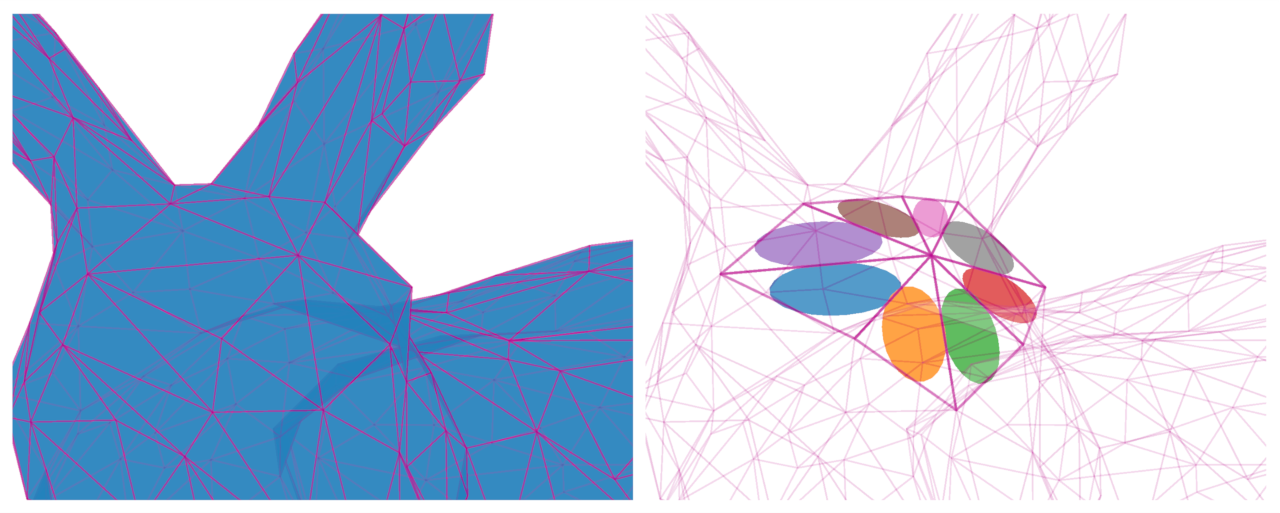
Visualizations
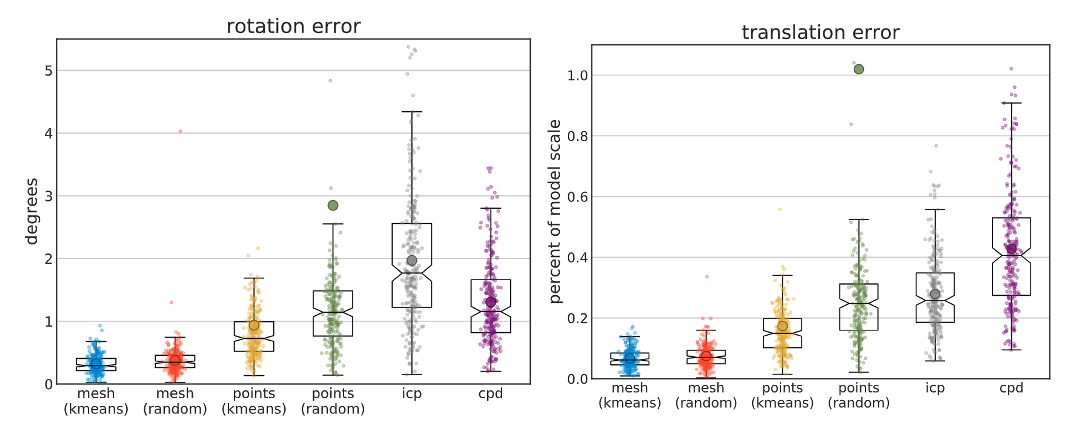
Pose Estimation Results
Triangle Covariance Structure
Paper
